动手学深度学习李沐
CIFAR-10 首先,导入竞赛所需要的包和模块:
import collectionsimport mathimport osimport shutilimport pandas as pdimport torchimport torchvisionfrom torch import nnfrom d2l import torch as d2l
2.1 下载数据集: d2l.DATA_HUB['cifar10_tiny' ] = (d2l.DATA_URL + 'kaggle_cifar10_tiny.zip' , '2068874e4b9a9f0fb07ebe0ad2b29754449ccacd' ) demo = True if demo: data_dir = d2l.download_extract('cifar10_tiny' ) else : data_dir = '../data/cifar-10/'
为了便于入门,我们提供包含前1000个训练图像和5个随机测试图像的数据集的小规模样本,如果要获取完整数据集,你需要将一下demo变量设置为False
2.2 整理数据集 首先我们用以下函数读取CSV文件中的标签,它返回一个字典,该字典将文件名中不带拓展名德部分映射到其标签。
def read_csv_labels (fname ): """读取fname来给标签字典返回一个文件名""" with open (fname, 'r' ) as f: lines = f.readlines()[1 :] tokens = [ return dict (((name, label) for name, label in tokens)) labels = read_csv_labels(os.path.join(data_dir, 'trainLabels.csv' )) print ('# 训练样本 :' , len (labels))print ('# 类别 :' , len (set (labels.values())))
接下来,我们定义reorg_train_valid函数来将验证集从原始的训练集中拆分出来。此函数中的参数valid_ratio是验证集中的样本数与原始训练集中的样本数之比。更具体的说,令n等于样本最少的类别中的图像数量,而r是比率。验证集将为每个类别拆分出max([nr],1)张图像。让我们以valid_ratio=0.1为例,由于原始的训练集有50000张图像,因此trian_valid_test/train路径中将有45000张图像用于训练,而剩下5000张图像将作为路径train_valid_test/valid中的验证集。组织数据集后,同类别的图像将被放置在同一文件夹下。
def copyfile (filename, target_dir ): """将文件复制到目标目录""" os.makedirs(target_dir, exist_ok=True ) shutil.copy(filename, target_dir) def reorg_train_valid (data_dir, labels, valid_ratio ): """将验证集从原始的训练集中拆分出来""" n = collections.Counter(labels.values()).most_common()[-1 ][1 ] n_valid_per_label = max (1 , math.floor(n * valid_ratio)) label_count = {} for train_file in os.listdir(os.path.join(data_dir, 'train' )): label = labels[train_file.split('.' )[0 ]] fname = os.path.join(data_dir, 'train' , train_file) copyfile(fname, os.path.join(data_dir, 'train_valid_test' , 'train_valid' , label)) if label not in label_count or label_count[label] < n_valid_per_label: copyfile(fname, os.path.join(data_dir, 'train_valid_test' , 'valid' , label)) label_count[label] = label_count.get(label, 0 ) + 1 else : copyfile(fname, os.path.join(data_dir, 'train_valid_test' , 'train' , label)) return n_valid_per_label
其中os.listdir显示指定路径下的文件和文件夹列表
下面的reorg_test函数用来预测期间整理测试集,以方便读取。
def reorg_test (data_dir ): """在预测期间整理测试集,以方便读取""" for test_file in os.listdir(os.path.join(data_dir, 'test' )): copyfile(os.path.join(data_dir, 'test' , test_file), os.path.join(data_dir, 'train_valid_test' , 'test' , 'unknown' ))
最后我们使用一个函数来调用前面定义的函数read_csv_labels,reorg_train_valid和reorg_test。
def reorg_cifar10_data (data_dir, valid_ratio ): labels = read_csv_labels(os.path.join(data_dir, 'trainLabels.csv' )) reorg_train_valid(data_dir, labels, valid_ratio) reorg_test(data_dir)
在这里,我们只将样本数据集的批量大小设置为32.在实际训练和测试中,应该使用Kaggle竞赛的完整数据集,并将batch_size设置为更大的整数,例如128.我们将10%的训练样本作为调整超参数的验证集。
batch_size = 32 if demo else 128 valid_ratio = 0.1 reorg_cifar10_data(data_dir, valid_ratio)
3.图像增广 使用图像增广来解决过拟合问题。在训练中,我们可以随机水平翻转图像。我们可以对彩色图像的三个RGB通道执行标准化。下面为一些可以调整的操作
transform_train = torchvision.transforms.Compose([ torchvision.transforms.Resize(40 ), torchvision.transforms.RandomResizedCrop(32 , scale=(0.64 , 1.0 ), ratio=(1.0 , 1.0 )), torchvision.transforms.RandomHorizontalFlip(), torchvision.transforms.ToTensor(), torchvision.transforms.Normalize([0.4914 , 0.4822 , 0.4465 ], [0.2023 , 0.1994 , 0.2010 ])])
在测试期间,我们只对图像执行标准化,以消除评估结果中的随机性
transform_test = torchvision.transforms.Compose([ torchvision.transforms.ToTensor(), torchvision.transforms.Normalize([0.4914 , 0.4822 , 0.4465 ], [0.2023 , 0.1994 , 0.2010 ])])
4.读取数据集 读取由原始图像组成的数据集,每个样本都包括一张图片和一个标签。
train_ds, train_valid_ds = [torchvision.datasets.ImageFolder( os.path.join(data_dir, 'train_valid_test' , folder), transform=transform_train) for folder in ['train' , 'train_valid' ]] valid_ds, test_ds = [torchvision.datasets.ImageFolder( os.path.join(data_dir, 'train_valid_test' , folder), transform=transform_test) for folder in ['valid' , 'test' ]]
当验证集在超参数调整过程中用于模型评估中,不应引入图像增广的随机性。在最终预测之前,我们根据训练集合验证集组合而成的训练模型进行训练,以充分利用所有标记的数据
train_iter, train_valid_iter = [torch.utils.data.DataLoader( dataset, batch_size, shuffle=True , drop_last=True ) for dataset in (train_ds, train_valid_ds)] valid_iter = torch.utils.data.DataLoader(valid_ds, batch_size, shuffle=False , drop_last=True ) test_iter = torch.utils.data.DataLoader(test_ds, batch_size, shuffle=False , drop_last=False )
5.定义模型 直接使用Resnet-18模型
def get_net (): num_classes = 10 net = d2l.resnet18(num_classes, 3 ) return net loss = nn.CrossEntropyLoss(reduction="none" )
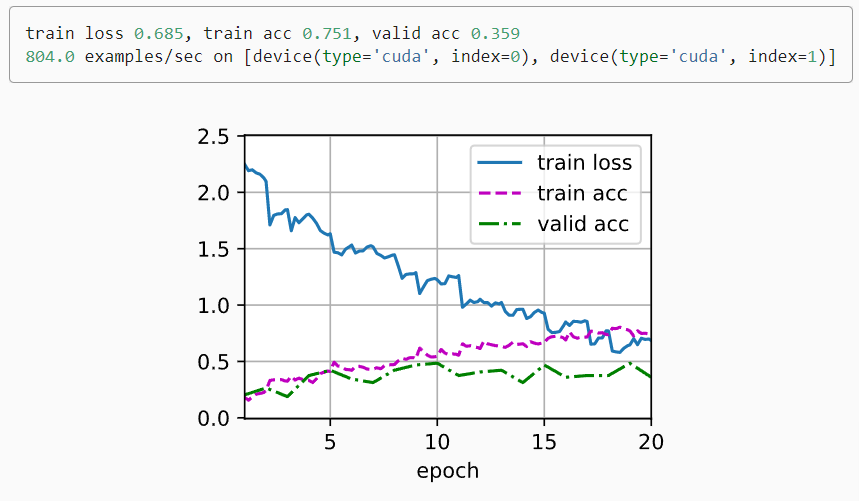
6.定义训练函数 def train (net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period, lr_decay ): trainer = torch.optim.SGD(net.parameters(), lr=lr, momentum=0.9 , weight_decay=wd) scheduler = torch.optim.lr_scheduler.StepLR(trainer, lr_period, lr_decay) num_batches, timer = len (train_iter), d2l.Timer() legend = ['train loss' , 'train acc' ] if valid_iter is not None : legend.append('valid acc' ) animator = d2l.Animator(xlabel='epoch' , xlim=[1 , num_epochs], legend=legend) net = nn.DataParallel(net, device_ids=devices).to(devices[0 ]) for epoch in range (num_epochs): net.train() metric = d2l.Accumulator(3 ) for i, (features, labels) in enumerate (train_iter): timer.start() l, acc = d2l.train_batch_ch13(net, features, labels, loss, trainer, devices) metric.add(l, acc, labels.shape[0 ]) timer.stop() if (i + 1 ) % (num_batches // 5 ) == 0 or i == num_batches - 1 : animator.add(epoch + (i + 1 ) / num_batches, (metric[0 ] / metric[2 ], metric[1 ] / metric[2 ], None )) if valid_iter is not None : valid_acc = d2l.evaluate_accuracy_gpu(net, valid_iter) animator.add(epoch + 1 , (None , None , valid_acc)) scheduler.step() measures = (f'train loss {metric[0 ] / metric[2 ]:.3 f} , ' f'train acc {metric[1 ] / metric[2 ]:.3 f} ' ) if valid_iter is not None : measures += f', valid acc {valid_acc:.3 f} ' print (measures + f'\n{metric[2 ] * num_epochs / timer.sum ():.1 f} ' f' examples/sec on {str (devices)} ' )
使用随机梯度下降和学习率规划来训练模型,以更快达到收敛。
7.训练和验证模型 以下所有超参数都可以调节
devices, num_epochs, lr, wd = d2l.try_all_gpus(), 20 , 2e-4 , 5e-4 lr_period, lr_decay, net = 4 , 0.9 , get_net() train(net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period, lr_decay)
8.Q&A Q1:深度学习的损失函数一般是非凸的吗?
损失函数一般是凸的,但是神经网络是非凸的(非单层)。凸函数表示能力有限。
Q2:训练时的训练集交叉熵loss大于验证集,但是训练集acc也是大于验证集的?
应该是因为在训练集上加了数据增广
Q3:normalize参数怎么来的?
由imagenet数据集上RGB的均值和方差
Q4:weight decay和lr decay的作用有什么区别吗?
weight decay是对权重更新的操作——正则化(统计),lr decay 是作用在学习率上——为了收敛(优化模型)
Q5:scheduler怎么设置是最好的最优的,怎么选择?
现在一般选用cosine函数,参数设置较少 。最好在前期保证比较大的lr,后期lr可以变小一点。具体流行什么说不准
Q6:lr decay和weight decay的效果?
效果类似,但是本质不同。