#include <ctype.h>
#include <errno.h>
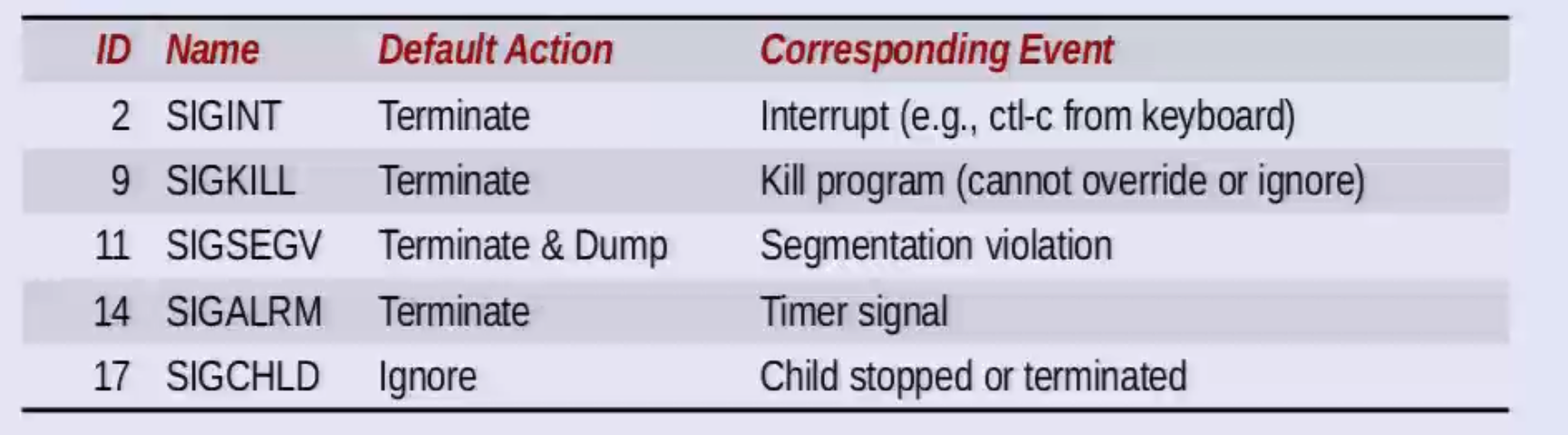
#include <signal.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
#define MAXLINE 1024
#define MAXARGS 128
#define MAXJOBS 16
#define MAXJID 1 << 16
#define UNDEF 0
#define FG 1
#define BG 2
#define ST 3
extern char **environ;
char prompt[] = "tsh> ";
int verbose = 0;
int nextjid = 1;
char sbuf[MAXLINE];
struct job_t {
pid_t pid;
int jid;
int state;
char cmdline[MAXLINE];
};
struct job_t jobs[MAXJOBS];
pid_t Fork(void);
void Execve(const char *filename, char *const argv[], char *const environ[]);
void eval(char *cmdline);
int builtin_cmd(char **argv);
void do_bgfg(char **argv);
void waitfg(pid_t pid);
void sigchld_handler(int sig);
void sigtstp_handler(int sig);
void sigint_handler(int sig);
int parseline(const char *cmdline, char **argv);
void sigquit_handler(int sig);
void clearjob(struct job_t *job);
void initjobs(struct job_t *jobs);
int maxjid(struct job_t *jobs);
int addjob(struct job_t *jobs, pid_t pid, int state, char *cmdline);
int deletejob(struct job_t *jobs, pid_t pid);
pid_t fgpid(struct job_t *jobs);
struct job_t *getjobpid(struct job_t *jobs, pid_t pid);
struct job_t *getjobjid(struct job_t *jobs, int jid);
int pid2jid(pid_t pid);
void listjobs(struct job_t *jobs);
void usage(void);
void unix_error(char *msg);
void app_error(char *msg);
typedef void handler_t(int);
handler_t *Signal(int signum, handler_t *handler);
int main(int argc, char **argv) {
char c;
char cmdline[MAXLINE];
int emit_prompt = 1;
dup2(1, 2);
while ((c = getopt(argc, argv, "hvp")) != EOF) {
switch (c) {
case 'h':
usage();
break;
case 'v':
verbose = 1;
break;
case 'p':
emit_prompt = 0;
break;
default:
usage();
}
}
Signal(SIGINT, sigint_handler);
Signal(SIGTSTP, sigtstp_handler);
Signal(SIGCHLD, sigchld_handler);
Signal(SIGQUIT, sigquit_handler);
initjobs(jobs);
while (1) {
if (emit_prompt) {
printf("%s", prompt);
fflush(stdout);
}
if ((fgets(cmdline, MAXLINE, stdin) == NULL) && ferror(stdin))
app_error("fgets error");
if (feof(stdin)) {
fflush(stdout);
exit(0);
}
eval(cmdline);
fflush(stdout);
fflush(stdout);
}
exit(0);
}
void eval(char *cmdline) {
char *argv[MAXARGS];
char buf[MAXLINE];
int bg;
pid_t pid;
sigset_t mask_all, mask_one, prev_one;
sigfillset(&mask_all);
sigemptyset(&mask_one);
sigaddset(&mask_one, SIGCHLD);
strcpy(buf, cmdline);
bg = parseline(buf, argv);
if (argv[0] == NULL)
return;
if (!builtin_cmd(argv)) {
sigprocmask(SIG_BLOCK, &mask_one, &prev_one);
if ((pid = Fork()) == 0) {
setpgid(0, 0);
sigprocmask(SIG_SETMASK, &prev_one, NULL);
Execve(argv[0], argv, environ);
}
sigprocmask(SIG_BLOCK, &mask_all, NULL);
addjob(jobs, pid, bg + 1, cmdline);
sigprocmask(SIG_SETMASK, &prev_one, NULL);
if (!bg) {
waitfg(pid);
}
else {
printf("[%d] (%d) %s", pid2jid(pid), pid, cmdline);
}
}
return;
}
int parseline(const char *cmdline, char **argv) {
static char array[MAXLINE];
char *buf = array;
char *delim;
int argc;
int bg;
strcpy(buf, cmdline);
buf[strlen(buf) - 1] = ' ';
while (*buf && (*buf == ' '))
buf++;
argc = 0;
if (*buf == '\'') {
buf++;
delim = strchr(buf, '\'');
}
else {
delim = strchr(buf, ' ');
}
while (delim) {
argv[argc++] = buf;
*delim = '\0';
buf = delim + 1;
while (*buf && (*buf == ' '))
buf++;
if (*buf == '\'') {
buf++;
delim = strchr(buf, '\'');
}
else {
delim = strchr(buf, ' ');
}
}
argv[argc] = NULL;
if (argc == 0)
return 1;
if ((bg = (*argv[argc - 1] == '&')) != 0) {
argv[--argc] = NULL;
}
return bg;
}
int builtin_cmd(char **argv) {
if (!strcmp(argv[0], "quit"))
exit(0);
if (!strcmp(argv[0], "jobs")) {
listjobs(jobs);
return 1;
}
if (!strcmp(argv[0], "bg") || !strcmp(argv[0], "fg")) {
do_bgfg(argv);
return 1;
}
if (!strcmp(argv[0], "&"))
return 1;
return 0;
}
void do_bgfg(char **argv) {
int doid;
pid_t pid;
pid_t t_pid;
if(argv[1] == NULL){
printf("%s command requires PID or %%jobid argument\n", argv[0]);
return;
}
int jflag = 0;
if(argv[1][0] == '%'){
jflag = 1;
if(isdigit(argv[1][1]) == 0){
printf("%s: argument must be a PID or %%jobid\n", argv[0]);
return;
}
doid = atoi(&argv[1][1]);
}
else{
if(isdigit(argv[1][0]) == 0){
printf("%s: argument must be a PID or %%jobid\n", argv[0]);
return;
}
doid = atoi(&argv[1][0]);
}
struct job_t * job;
if(jflag){
job = getjobjid(jobs, doid);
if(job == NULL){
printf("%d: No such job\n", doid);
return;
}
}
else{
job = getjobpid(jobs, doid);
if(job == NULL){
printf("(%d): No such process\n", doid);
return;
}
}
if (!strcmp(argv[0], "bg")) {
kill(-job->pid, SIGCONT);
job->state = BG;
printf("[%d] (%d) %s",job->jid,job->pid,job->cmdline);
}
else{
t_pid = fgpid(jobs);
if(job->state == ST){
kill(-job->pid, SIGCONT);
}
job->state = FG;
pid = job->pid;
if(t_pid != 0){
job = getjobpid(jobs, doid);
job->state = BG;
}
waitfg(pid);
}
return;
}
void waitfg(pid_t pid) {
while(pid == fgpid(jobs))
sleep(1);
return;
}
void sigchld_handler(int sig) {
int olderrno = errno;
sigset_t mask_all,prev_all;
pid_t pid;
int status;
sigfillset(&mask_all);
while((pid = waitpid(-1,&status,WNOHANG | WUNTRACED))>0){
if (WIFEXITED(status)) {
sigprocmask(SIG_BLOCK, &mask_all, &prev_all);
deletejob(jobs, pid);
sigprocmask(SIG_SETMASK, &prev_all, NULL);
}
if(WIFSIGNALED(status)) {
sigprocmask(SIG_BLOCK, &mask_all, &prev_all);
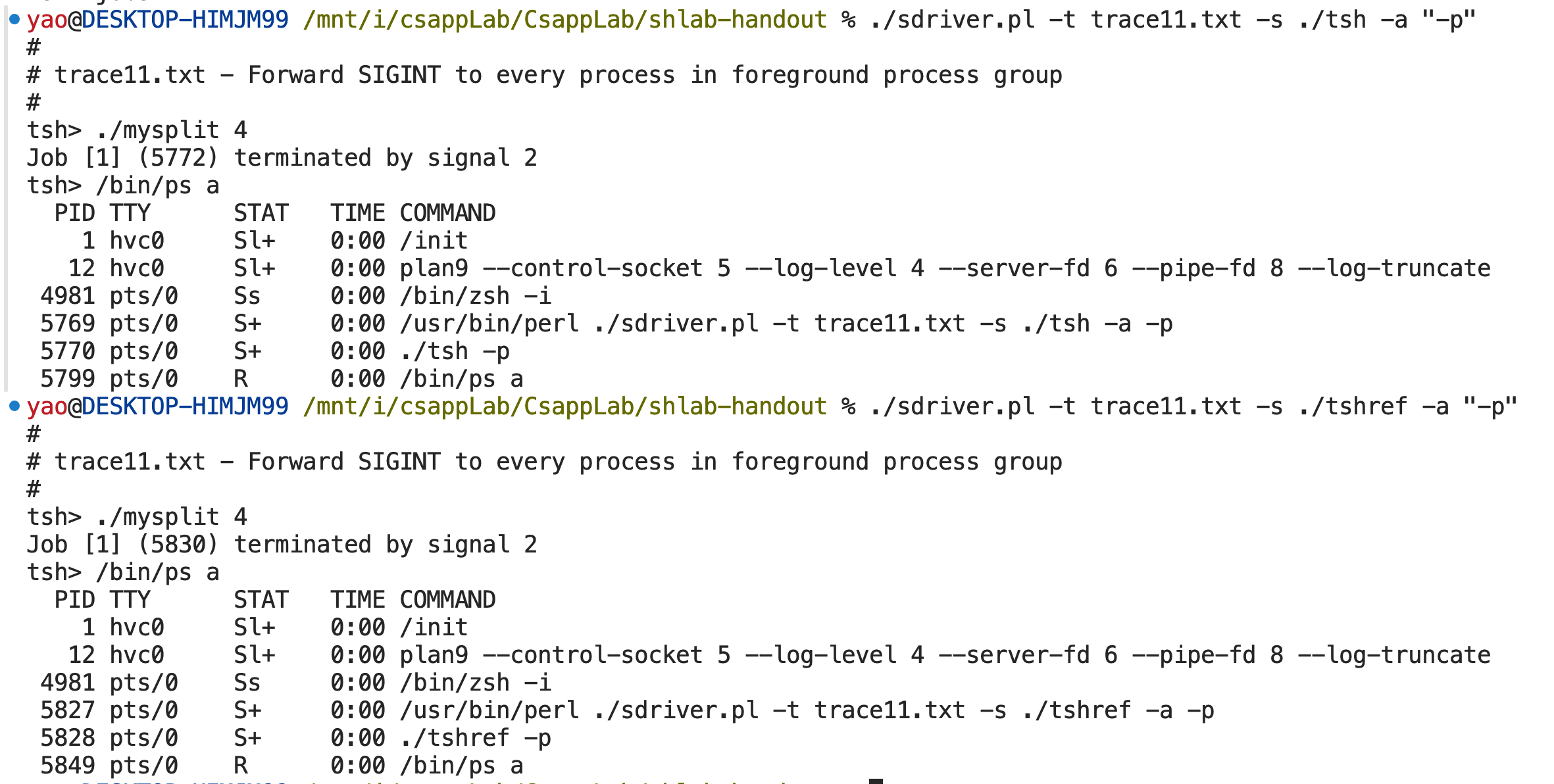
printf("Job [%d] (%d) terminated by signal %d\n", pid2jid(pid), pid, WTERMSIG(status));
deletejob(jobs, pid);
sigprocmask(SIG_SETMASK, &prev_all, NULL);
}
if(WIFSTOPPED(status)) {
sigprocmask(SIG_BLOCK, &mask_all, &prev_all);
printf("Job [%d] (%d) stopped by signal %d\n", pid2jid(pid), pid, WSTOPSIG(status));
struct job_t * fgjob = getjobpid(jobs, pid);
fgjob->state = ST;
sigprocmask(SIG_SETMASK, &prev_all, NULL);
}
}
errno = olderrno;
return;
}
void sigint_handler(int sig) {
int olderrno = errno;
pid_t pid;
pid = fgpid(jobs);
kill(-pid, sig);
errno = olderrno;
return;
}
void sigtstp_handler(int sig) {
int olderrno = errno;
pid_t pid;
pid = fgpid(jobs);
kill(-pid, sig);
errno = olderrno;
return;
}
pid_t Fork(void) {
pid_t pid;
if ((pid = fork()) < 0)
unix_error("Fork error");
return pid;
}
void Execve(const char *filename, char *const argv[], char *const environ[]) {
if (execve(filename, argv, environ) < 0) {
printf("%s: Command not found.\n", filename);
exit(0);
}
}
void clearjob(struct job_t *job) {
job->pid = 0;
job->jid = 0;
job->state = UNDEF;
job->cmdline[0] = '\0';
}
void initjobs(struct job_t *jobs) {
int i;
for (i = 0; i < MAXJOBS; i++)
clearjob(&jobs[i]);
}
int maxjid(struct job_t *jobs) {
int i, max = 0;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].jid > max)
max = jobs[i].jid;
return max;
}
int addjob(struct job_t *jobs, pid_t pid, int state, char *cmdline) {
int i;
if (pid < 1)
return 0;
for (i = 0; i < MAXJOBS; i++) {
if (jobs[i].pid == 0) {
jobs[i].pid = pid;
jobs[i].state = state;
jobs[i].jid = nextjid++;
if (nextjid > MAXJOBS)
nextjid = 1;
strcpy(jobs[i].cmdline, cmdline);
if (verbose) {
printf("Added job [%d] %d %s\n", jobs[i].jid, jobs[i].pid, jobs[i].cmdline);
}
return 1;
}
}
printf("Tried to create too many jobs\n");
return 0;
}
int deletejob(struct job_t *jobs, pid_t pid) {
int i;
if (pid < 1)
return 0;
for (i = 0; i < MAXJOBS; i++) {
if (jobs[i].pid == pid) {
clearjob(&jobs[i]);
nextjid = maxjid(jobs) + 1;
return 1;
}
}
return 0;
}
pid_t fgpid(struct job_t *jobs) {
int i;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].state == FG)
return jobs[i].pid;
return 0;
}
struct job_t *getjobpid(struct job_t *jobs, pid_t pid) {
int i;
if (pid < 1)
return NULL;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].pid == pid)
return &jobs[i];
return NULL;
}
struct job_t *getjobjid(struct job_t *jobs, int jid) {
int i;
if (jid < 1)
return NULL;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].jid == jid)
return &jobs[i];
return NULL;
}
int pid2jid(pid_t pid) {
int i;
if (pid < 1)
return 0;
for (i = 0; i < MAXJOBS; i++)
if (jobs[i].pid == pid) {
return jobs[i].jid;
}
return 0;
}
void listjobs(struct job_t *jobs) {
int i;
for (i = 0; i < MAXJOBS; i++) {
if (jobs[i].pid != 0) {
printf("[%d] (%d) ", jobs[i].jid, jobs[i].pid);
switch (jobs[i].state) {
case BG:
printf("Running ");
break;
case FG:
printf("Foreground ");
break;
case ST:
printf("Stopped ");
break;
default:
printf("listjobs: Internal error: job[%d].state=%d ",
i, jobs[i].state);
}
printf("%s", jobs[i].cmdline);
}
}
}
void usage(void) {
printf("Usage: shell [-hvp]\n");
printf(" -h print this message\n");
printf(" -v print additional diagnostic information\n");
printf(" -p do not emit a command prompt\n");
exit(1);
}
void unix_error(char *msg) {
fprintf(stdout, "%s: %s\n", msg, strerror(errno));
exit(1);
}
void app_error(char *msg) {
fprintf(stdout, "%s\n", msg);
exit(1);
}
handler_t *Signal(int signum, handler_t *handler) {
struct sigaction action, old_action;
action.sa_handler = handler;
sigemptyset(&action.sa_mask);
action.sa_flags = SA_RESTART;
if (sigaction(signum, &action, &old_action) < 0)
unix_error("Signal error");
return (old_action.sa_handler);
}
void sigquit_handler(int sig) {
printf("Terminating after receipt of SIGQUIT signal\n");
exit(1);
}
|